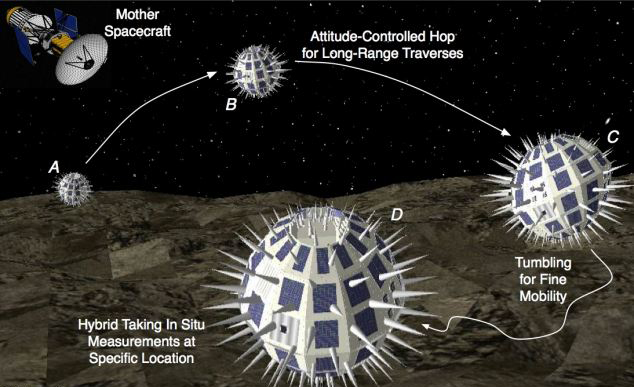
刺猬机器人在被航天器释放后,不仅能在火卫一表面跳跃和滚动,同时能够准确到达目标位置收集信息。
据英国《每日邮报》网站1月21日的报道,美国斯坦福大学的研究人员目前正联合美国国家航空航天局(NASA)喷气推进实验室和麻省理工学院研发一种全新的小型探测器“刺猬机器人”,用来对火卫一进行相关探测,为未来的火星任务提供帮助。
据了解,宽度约0.5米的“刺猬机器人”全身布满尖刺,未来将由大小与一张咖啡桌相仿的“火卫一航天器”携带飞往火卫一。在抵达目的地之后,火卫一航天器将会持续环绕火卫一飞行,首先会用数月时间对火卫一的地形进行勘测,然后选择合适的时机释放出“刺猬机器人”。
航天器会依次释放5到6个“刺猬机器人”来对火卫一进行全面深入的探测,每次释放一个,航天器还会对“刺猬机器人”的具体着陆位置和行进方向进行“指挥”。

相关文章









